




Technický monitor
Právní servis
Podporujeme





Mobilní obrábění: Revoluce v leteckém průmyslu?
 Na loňském aerosalonu v Paříži bylo možné kromě plejády nejmodernějších i historických letadel, raket a dalších ukázek techniky vidět i pozoruhodný systém nové technologie výroby, který by mohl výrazně ovlivnit další rozvoj segmentu aerospace.
Na loňském aerosalonu v Paříži bylo možné kromě plejády nejmodernějších i historických letadel, raket a dalších ukázek techniky vidět i pozoruhodný systém nové technologie výroby, který by mohl výrazně ovlivnit další rozvoj segmentu aerospace.
Když nejde hora k Mohamedovi…
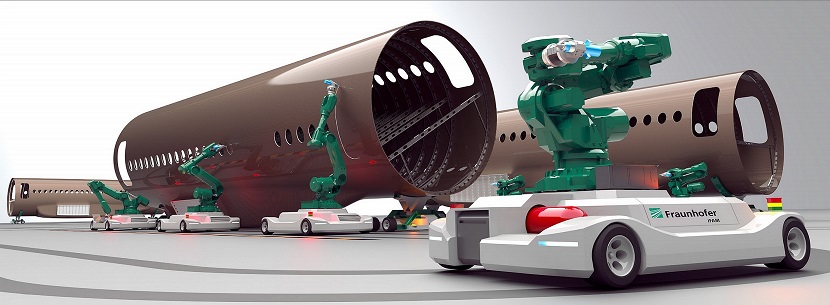
Fraunhoferův Institut pro výrobní technologie a pokročilé materiály (IFAM) ve spolupráci s firmou Siemens vytvořily systém mobilního obrábění, který může znamenat skutečný průlom v odvětví. Myšlenka je geniálně jednoduchá: Proč místo komplikovaného pohybu a náročných přesunů velkých struktur na obráběcí pracoviště nepřivést CNC stroj k obrobku?
Složka 1: AGV jako mobilní
 platforma
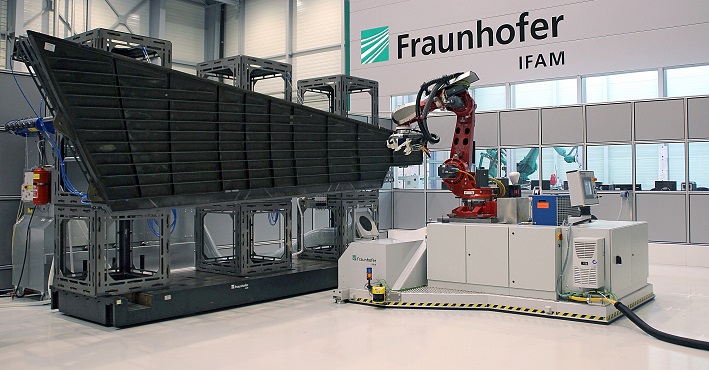
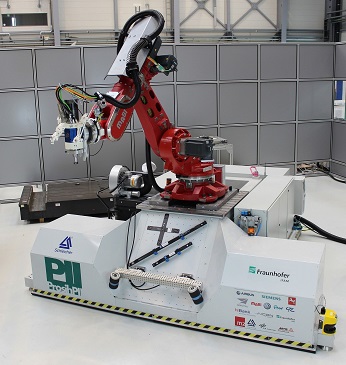
platformaSpolu s různými partnery vyvinul projektový tým automatizované řízené vozidlo (AGV) jako základní a stabilní mobilní obráběcí centrum, přičemž největší výzvou bylo dosáhnout stupně přesnosti požadované v leteckém průmyslu. Vzhledem k tomu, že letecké komponenty mají často délku až 20 m, byla při navrhování nového robota klíčová nejen mobilita, ale i potřebná stabilita. Robot provádějící obráběcí postupy je namontován na AGV a přesná poloha je určována pomocí laserového systému. Při své 6tunové hmotnosti je mobilní stroj dostatečně tuhý, aby dosáhl přesných výsledků obrábění, ale přesto je schopen volně se plynule pohybovat, a dokonce se otáčet kolem své osy.
Složka 2: Šestiosý robot
Roboti už prokázali svou vysokou výkonnost a efektivitu, pokud jde o typické operace např. typu pick & place. Ve srovnání s precizností CNC strojů jsou však jejich pohyby méně přesné. Pro projekt mobilního obrábění proto tým vybral 6osé roboty s velmi přesnými pohony, které obsahují servopřevodníky a servomotory, speciální měřicí systémy na každé ose pro relativní pohyby, druhý kódovací systém na kloubech robotů a přesně vyvinuté kalibrační rutiny.
 Složka 3: Přímé ovládání
Složka 3: Přímé ovládáníPrůlom z hlediska přesnosti a flexibility však přichází především s třetí složkou řešení. Roboti vyžadují přizpůsobený programovací software, který je třeba zakoupit od externích dodavatelů a pracovníci musí být speciálně vyškoleni, aby mohli programovat a obsluhovat roboty.
Konstruktéři se při řešení tohoto úkolu museli podívat na robota jako na specifický stroj, se záměrem umožnit roboty přímo programovat pomocí CNC, obdobně jako je tomu u obráběcích strojů. Díky tomu může vše probíhat pod jedním ovládacím uživatelským rozhraním, které personál dobře zná z klasických CNC obráběcích center.
Pro projekt mobilního obrábění byl k řízení dráhy robota použit systém SINUMERIK a k určení pozice AGV se používá PLC SIMATIC. V tomto nastavení může robot dosáhnout mnohem vyššího stupně přesnosti prostřednictvím CNC řízené dráhy, a přitom má stále kapacitu volně se pohybovat po celé výrobní hale.
Siemens SINUMERIK RunMyRobot / Direct Control umožňuje bezproblémovou integraci mobilního obráběcího systému do operačního systému CNC obráběcích strojů i do celého výrobního prostředí. Zkušený uživatel CNC tak může naprogramovat celou robotickou jednotku pomocí zavedeného G-kódu. Programy CAM (Computer-Aided Manufacturing) lze přenést přímo do robota, tak není potřeba další personál a provádění školení.
Využívá existující technologie
Fraunhofer IFAM a Siemens vyvinuly mobilní obrábění založené na technologiích a know-how, které již existují ve výrobních oblastech. To usnadňuje integraci do CAD/CAM, PLM a plánovacích systémů nebo jako digitální dvojče pro simulační rutiny.
V širší perspektivě je mobilní obrábění základem pro integraci průmyslové výroby velkých struktur do digitalizace celého hodnotového a dodavatelského řetězce, čímž se uvolní velký potenciál pro optimalizaci, automatizaci a škálovatelnost operací.
Například pokud dodavatel leteckých motorů zaostává za dodacím plánem, může dojít k zastavení výrobní linky, ale plně integrovaná mobilní výrobní obráběcí síť by v takovém případě umožnila pružně zaplnit mezeru, protože mobilní stroje lze snadno znovu nasadit a použít na jiném místě.
První prototyp AGV s namontovaným robotem byl představen jako koncept už na Hannover Messe 2018 a nedávno i na letecké výstavě ILA v Berlíně. Testy prokázaly, že prototypy systémů mobilního obrábění IFAM mohou provádět obráběcí operace typické pro letecký průmysl s absolutní a opakovanou přesností.
Skutečný potenciál mobilního obrábění však spočívá v tom, že několik robotů pracuje na jednom obrobku současně, což umožní výrazně rychlejší operace. Se dvěma roboty v provozu se očekává snížení výrobních časů nejméně o 30 %. A toto číslo lze snadno zvýšit, pokud bude na jednom obrobku nasazeno ještě více robotů.
Pohled do budoucnosti
Systém mobilního obrábění má velký potenciál pro automatizované obrábění velkých dílů vysoce flexibilním způsobem. Transformuje obrovské tovární oblasti na flexibilní výrobní sítě, které budou snadno propojitelné s průmyslovým internetem věcí a plným potenciálem správy digitálních dat včetně dodavatelského řetězce prostřednictvím IoT platforem, otevírá zcela nové možnosti optimalizace a škálovatelnosti. Kromě výroby v aerospace mohou systémy mobilního obrábění způsobit revoluci ve výrobě lopatek rotorů, systémů větrných turbín, struktur kolejových vozidel i velkých sestav v oblasti stavby lodí.
Projekty pro mobilní obrábění již byly zahájeny. Než však uvidíme roje autonomních robotů ve velkém měřítku průmyslové výroby, bude ještě nutné vyřešit řadu souvisejících otázek – např. jak bude vypadat situace, když je ve výrobní lince či provozu flexibilně rozmístěno několik mobilních robotických jednotek? Jak lze zajistit bezpečnost pracovníků a spolehlivě zabránit kolizím?
V budoucnu by mohly být zbývající manuální výrobní postupy nahrazeny pružnými mobilními operacemi s výrazně větším automatizačním potenciálem a plnou digitální připraveností odemykající přístup ke zcela novým možnostem pro leteckou výrobu včetně flexibilnějších a rychlejších procesů prostřednictvím využití strojového učení, robotiky či 3D tisku.
Daniel Bestian
Publikováno: 19. 8. 2020 |
Počet zobrazení: 967
 204
204
204
Aktuální číslo

Nejčtenější články



