









Adaptivní tempomaty dopravní zácpy nevyřeší
 Vědci z Fakulty elektrotechnické ČVUT testovali, co se stane, když se na silnici vytvoří kolona z více aut se zapnutým adaptivní tempomatem. Experiment ukázal, že na českých silnicích bude docházet i s použitím ACC ke kvalitativně stejnému chování jako u lidských řidičů – tedy ke vzniku bezdůvodných (fantomových) dopravních zácp.
Vědci z Fakulty elektrotechnické ČVUT testovali, co se stane, když se na silnici vytvoří kolona z více aut se zapnutým adaptivní tempomatem. Experiment ukázal, že na českých silnicích bude docházet i s použitím ACC ke kvalitativně stejnému chování jako u lidských řidičů – tedy ke vzniku bezdůvodných (fantomových) dopravních zácp.
V pátek 6. prosince na letišti v Mnichově Hradišti provedl tým z Fakulty elektrotechnické ČVUT pod vedením docenta Zdeňka Huráka unikátní experiment s osobními automobily vybavenými adaptivními tempomaty (angl. adaptive cruise control, ACC). Vědci na dvoukilometrové pojezdové dráze sestavili řadu celkem 12 vozů se zapnutým ACC v závěsu za vedoucím vozem. Ten měl za úkol nejprve nastoupit plynulou jízdu v rychlosti 60 km/h, poté mírným a krátkým brzděním zpomalit na 50 km/h a pak opět zrychlit na původní cestovní rychlost. Ostatní vozy měly adaptivní tempovat nastavený na 80 km/h. Vědci pak zaznamenávali reakce těchto vozů v koloně, tedy změny jejich rychlosti.
Výsledek: řetězová nestabilita
A k čemu při změně rychlosti vedoucího vozu došlo? Řidiči v posledních pořadích kolony mohli pozorovat, že jejich vůz přibrzdil až na 30 km/h a následně zrychlil až na 80 km/h (hodnota nastavená na jejich tempomatech), než se zase ustálil na původní cestovní rychlosti vedoucího vozu 60 km/h. Pozorovaný jev je pod názvem řetězová nestabilita dobře známý z řízení vozů lidskými řidiči. V případě adaptivních tempomatů, kdy o zrychlení a brzdění rozhoduje palubní řídicí počítač pouze na základě měření vlastní rychlosti a vzdálenosti k předchozímu vozu, je v mezinárodní odborné komunitě známo, že řetězovou nestabilitu by mělo být možné potlačit. Experiment však ukázal, že u náhodného vzorku vozů na českých silnicích dochází ke kvalitativně stejnému chování jako u lidských řidičů. Naděje, že při větším zastoupení vozů s adaptivními tempomaty (v dnešním provedení) na českých dálnicích přestanou vznikat bezdůvodné (fantomové) dopravní zácpy, se tak ukazuje jako lichá.
Nešlo o srovnání ACC proti člověku
Předmětem experimentu nebylo, zda je pozorovaný příspěvek k řetězové nestabilitě u vozů vybavených adaptivním tempomatem silnější nebo slabší, než když řídí člověk. Ve prospěch adaptivních tempomatů obecně mluví spolehlivost, přesnost a rychlost strojového rozhodování, v jeho neprospěch však neschopnost předvídat, byť i jen rozpoznáním rozsvícených brzdových světel předchozího vozu (či několika vozů) a neschopnost přečíst a vyhodnotit upozornění o blížícím se zúžení či práci na silnici.
Stejně tak nebylo cílem experimentu porovnávat jednotlivé vozy mezi sebou. Vědci neprováděli důkladné (a časově náročné) experimenty s jednotlivými vozy. Jedině na základě takových měření by bylo možné spolehlivě kvantifikovat míru přispívání konkrétních adaptivních tempomatů k řetězové nestabilitě celku. Není však vyloučeno, že u vozů různých značek a typů bude různá.
Budoucnost: kooperativní adaptivní tempomaty
Výraznější zlepšení schopností těchto asistenčních systémů s ohledem na jejich dopad na plynulost dopravy lze očekávat až po zakomponování dalších funkcí, např. schopnosti rozpoznat rozsvícené brzdové světlo jednoho nebo více vozů vpředu, či dokonce formou bezdrátové komunikace mezi vozy (V2V) přijmout informace o dění vpředu. V mezinárodní odborné komunitě jsou takovéto systémy, označované kooperativní adaptivní tempomaty (angl. CACC), předmětem velmi intenzivního výzkumu a v experimentálním provozu už byly představeny první prototypy.
Vědci chtějí data změřená při experimentu využít k vývoji přesnějších modelů popisujících dynamiku vozů vybavených adaptivními tempomaty. Tyto budou publikovány v odborném tisku, nicméně už teď jsou data z experimentů přístupná i veřejnosti na adrese: https://gitlab.fel.cvut.cz/aa4cc/acc/lkmh
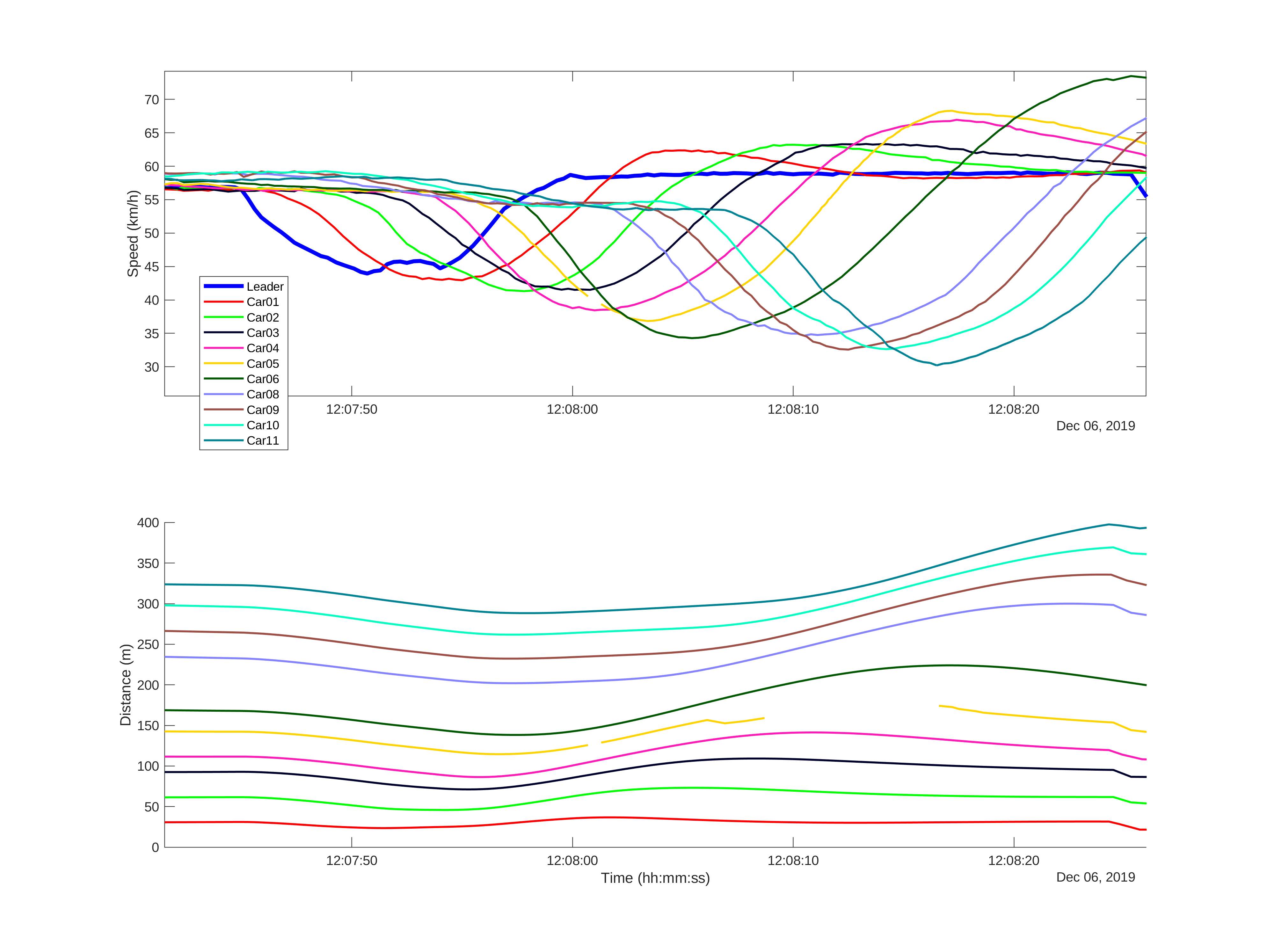
Nahoře průběh rychlostí vedoucího vozidla (silnější modrá čára) a vozidel s adaptivními tempomaty (záznamy pro vůz 7 chybí).
Dole průběh vzdáleností k vedoucímu vozu. Vedoucí vůz na pár vteřin zpomalil o cca 10 km/h, aby se následně vrátil na původní rychlost cca 60 km/h, zatímco vozidla ke konci kolony snižovala rychlost až na 30 km/h a následně přesahovala 70 km/h.




